Interdisciplinary research, conducted in three faculties at the Technion, reveals the optimal configuration of tiny robots that will move inside the body and perform various medical tasks. The model developed at the Technion outperforms previous models that were developed inspired by nature
A research group from three faculties at the Technion deciphered the optimal configuration for driving tiny robots that swim in the human body. The research, published in the journal Science Robotics, was led by Prof. Alex Lishansky from the Wolfson Faculty of Chemical Engineering.
Many research groups around the world have been engaged in the last decade in the development of tiny robots - nanometer and micrometer - that move in a liquid environment. This is because such robots may contribute a lot to the world of medicine, for example by transporting medicines.
The initial source of inspiration for the development of tiny robots is the movement of bacteria, which move by means of a thin helical rod (flagellum). The rotation of the rod in the liquid creates friction that moves the bacteria. Inspired by this natural mechanism, these groups developed tiny coils driven by a rotating uniform magnetic field.

Using a rotating magnetic field to propel tiny objects has several advantages, including the low field strength required for this purpose. Since the production of tiny coils is a complex process, it has recently been proposed to use random clusters of magnetic nanoparticles as tiny "swimmers". These aggregates are created in a simple process of grouping (aggregation). Now, in a study published in Science Robotics, Technion researchers show that this approach does not lead to the optimal results.
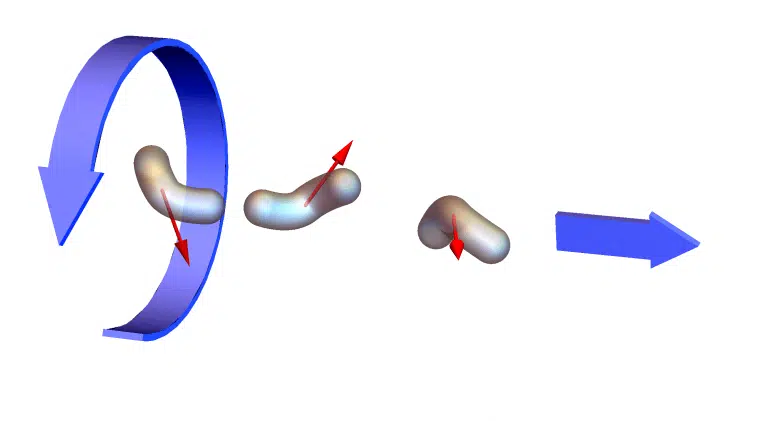
As part of the research, the Technion researchers developed a theory that makes it possible to calculate the optimal movement speed of magnetic swimmers depending on the shape and the magnet. Using this theory, they quantified the maximum possible speed of random magnetic aggregates and calculated optimal configurations of "swimmers" for this propulsion mechanism. To their surprise, they discovered that the thin coil developed inspired by nature was not the optimal structure, and that the optimal shape resembled a thick bow with curled edges. Also, they found that the formations they discovered move at a speed several times higher than the speed of the previously developed random aggregates.
The technical research group includes researchers from three faculties: the Faculty of Mathematics, the Faculty of Physics and the Wolfson Faculty of Chemical Engineering. Prof. Alex Lishansky, who led the research, estimates that the findings will lead to the development of more efficient micro-robots. According to him, "the assumption of most research groups working in the field was that the helical structure of the tiny swimmer, which was developed inspired by nature, is the optimal structure. To our surprise, we discovered that the optimal shape is not helical, and to our delight we were able to present a more efficient configuration."
The research was supported by the Germany-Israel Foundation (GIF), the Israel Science Foundation (ISF) and a joint grant ("talisman") of the Office for Absorption and the Planning and Budgeting Committee of the Higher Education Council.
In the video: the optimal artificial swimmer rotates around itself under the influence of the magnetic field and thus moves upwards
More of the topic in Hayadan:
- Nano robots made of bacteria will precisely attack cancer cells instead of the current and comprehensive chemotherapy
- Run the nano-robots / Larry Greenmeyer
- An important advance in the development of medical nanorobots
- The robot that will fix me: nanotechnology in the human body - from Dr.Roey Tsezana's book "The Guide to the Future"
