Scientists have succeeded in developing a feedback-controlled optical pickup consisting of highly focused laser light. This forceps can grasp clusters of cells in a controlled manner and rotate them in any direction. This approach will make it possible to more accurately examine tiny biological objects, such as cancerous tumors
[Translation by Dr. Moshe Nachmani]
The researchers explain that with the help of their new approach it is possible to test the quality and freshness of fruits and vegetables, and even produce industrial robots that can use the innovative device. However, how is it even possible to grasp and rotate objects as wide as a human hair? Professor Alexander Rohrbach from the University of Freiburg in Germany and his research team have long published their article regarding this research in the scientific journal Nature Communications..
This research of theirs demonstrates how several optical collectors, consisting of specially focused laser light, will in the future be able to grasp clusters of cells in a controlled manner and rotate them in any desired direction. This method will make it possible to more accurately examine tiny biological objects such as tiny cancerous tumors. In the laboratory, the main advantage of such an optical gripper lies in the fact that, unlike a mechanical gripper, it is able to grip even invisible objects (to the naked eye).
Optical collectors based on computerized holograms capable of focusing laser light, pixel by pixel, in random configurations, have been used for years to control the positions of optical grip fingers in the XNUMXD space. This method has existed in research laboratories for about two decades, but it cannot exert forces on larger objects, those that have a diameter greater than a tenth of a millimeter. These pickets encountered problems due to the fact that the objects are too large and it is not possible to grasp them firmly enough and rotate them in a liquid solution, because the picket is too weak or a good grip angle cannot be found.
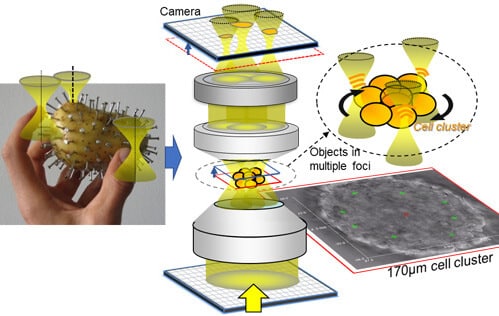
The new pick-up, nicknamed the 'non-blind pick-up', sees the grip point by measuring and analyzing the light scattered on top of the bone," explains the lead researcher. "We see different objects with our eyes because the sunlight or the light coming from the lamps in the room is scattered on their outer surface and is reproduced in the retina." These pickets can indeed grasp invisible objects, but the biological objects that the scientists study under a microscope, such as clusters of cells (tiny tumors) or embryos of small flies, are not completely transparent, but behave like frosted glass in a shower room window, in which case the light is scattered After its entry it is therefore difficult to analyze it. The researchers' new idea was to analyze the unfocused light scattered from the object using a high-speed camera located behind the object, a camera that serves as a feedback signal. The more asymmetric the light points of the individual light collectors, the more focused light is scattered, which leads to a greater difference in the refractive index at the point of contact with the object. These are the points that the optical pickups can effectively grasp the bone. In physics terms, a local change in the polarization of the material leads to a greater dipole optical power.
According to the lead researcher, the amazing thing about the principle of localizing the best grip position is that the light scattering - that is, the change in momentum - is stronger directly in the direction of the laser focus than in front or behind the focus point. Each of the five to ten optical pickups is supposed to sense the best grip position based on the scattered light, with the aim of rotating the bone in different directions. If one of the grippers applies too much force, then the other grippers, as compensation, can loosen their grip. "This will be a particularly complex optimization problem that we will be wondering about in the coming years," said the lead researcher. His vision is that, if successful, the concept of non-contact sample holding should be incorporated into future microscope instruments. The full article about the study
More of the topic in Hayadan:
